Protótipo da Interface de Usuário
Durante a terceira sprint, o grupo Cannabot deu início ao desenvolvimento das telas do frontend. Todas as telas foram desenvolvidas com base no wireframe e mockup que foram desenvolvidos na última sprint. Durante esta sprint o grupo foi capaz de desenvolver as telas da página inicial com o heatmap, controle do robô e histórico de uso.
Esse desenvolvimento pode ser acompanhado a seguir:
Telas e Tecnologias
Antes de mais nada é primordial comentar sobre as tecnologias que foram utilizadas para desenvolver o frontend. O grupo opteu por desenvolver as telas utilizando as seguintes tecnologias: cd.
O motivo da escolhas dessas técnologias é que os membros do grupo que ficaram responsáveis por fazer o frontend gostariam de aprender novas tecnologias. Assim, o Vue se torna uma escolha óbvia visto que é um framework muito utilizado na industria, totalmente open source e todo o código é escrito em uma única página.
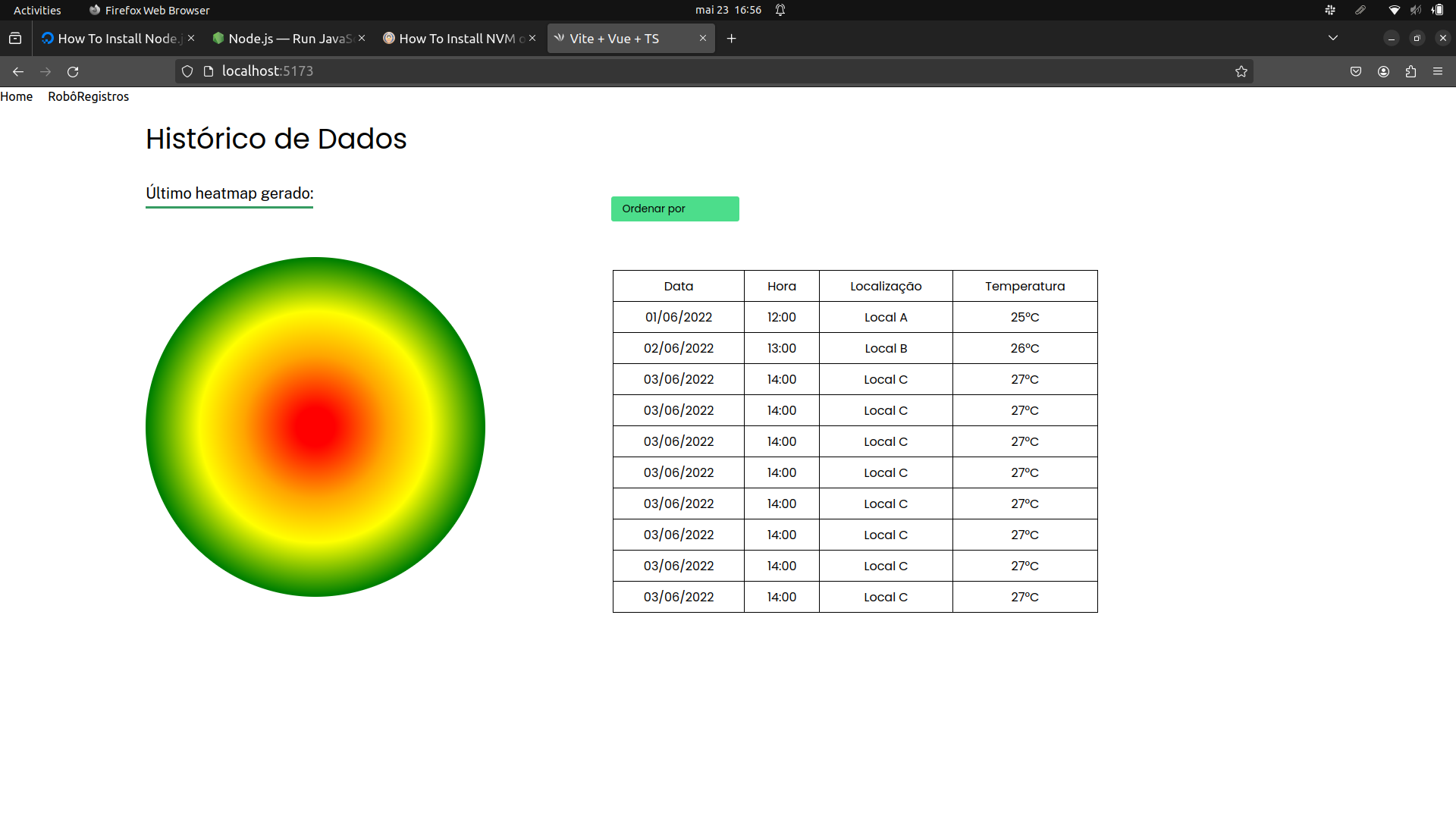
Tela inicial
A tela inicial é onde o usuário pode conferir o histórico das medições de temperatura do robô e o mapa de calor gerado pelos dados do sensor.
Assim, é possível entender como anda a temperatura do reboiler e acompanhar as medições ao longo do tempo.
 Fonte: Elaborado pelo grupo Cannabot
Fonte: Elaborado pelo grupo Cannabot
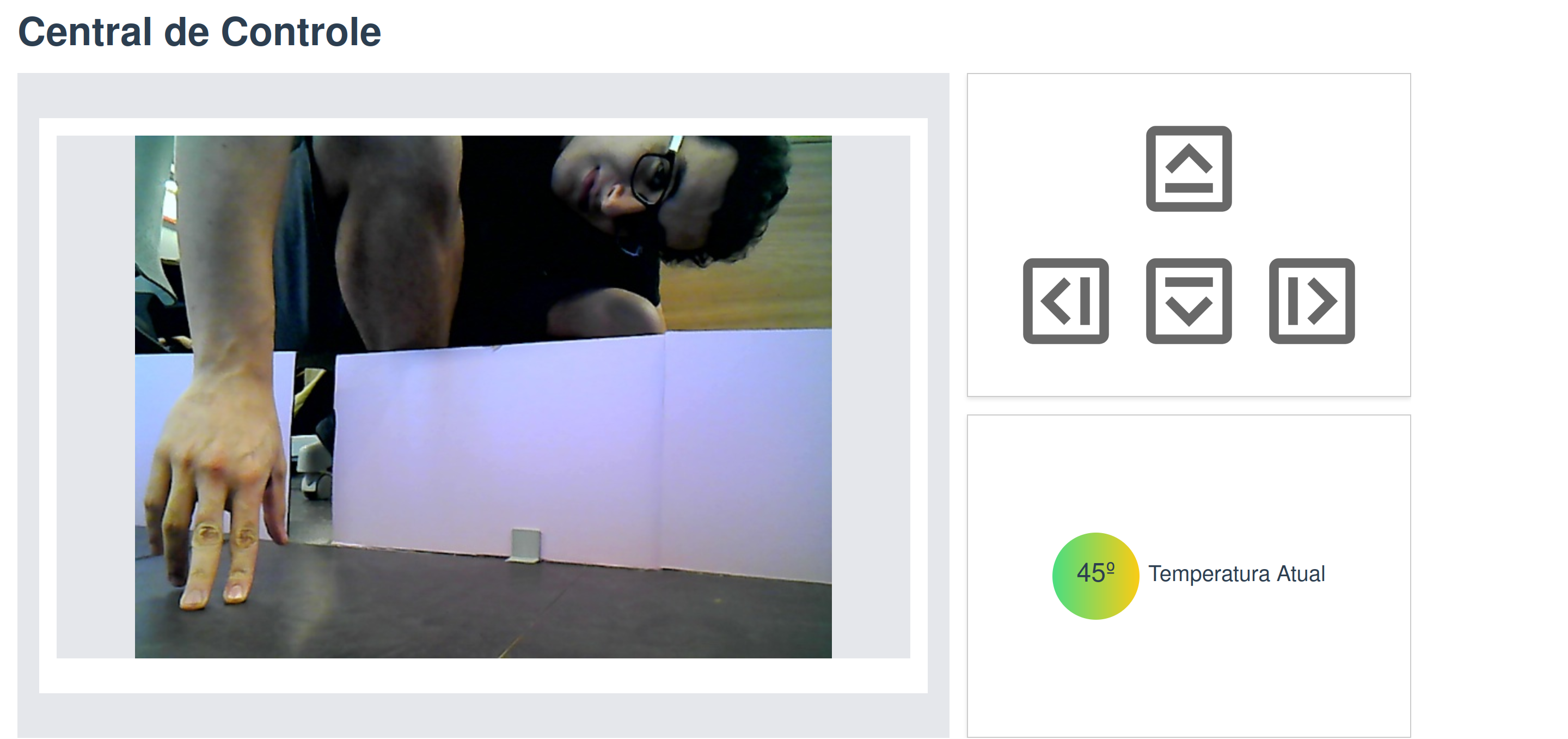
Controle do robô
 Fonte: Elaborado pelo grupo Cannabot
Fonte: Elaborado pelo grupo Cannabot
Na página de "Central de Controle", o usuário é capaz de conduzir o robô com as teclas W,A,S,D ou as setinhas do teclado númerico. Além disso, é possível visualizar a transmissão ao vivo da imagem capturada pelo robô, juntamente com a temperatura registrada pelo seu sensor. Ademais, há o sensor que detecta o quão próximo o robô está de algum objeto e não permite sua movimentação.
Por último, mas não menos importante há o botão de parada de emergência, quando o usuário aperta a tecla Q é cortada a conexão com o robô e o mesmo para de se mover.
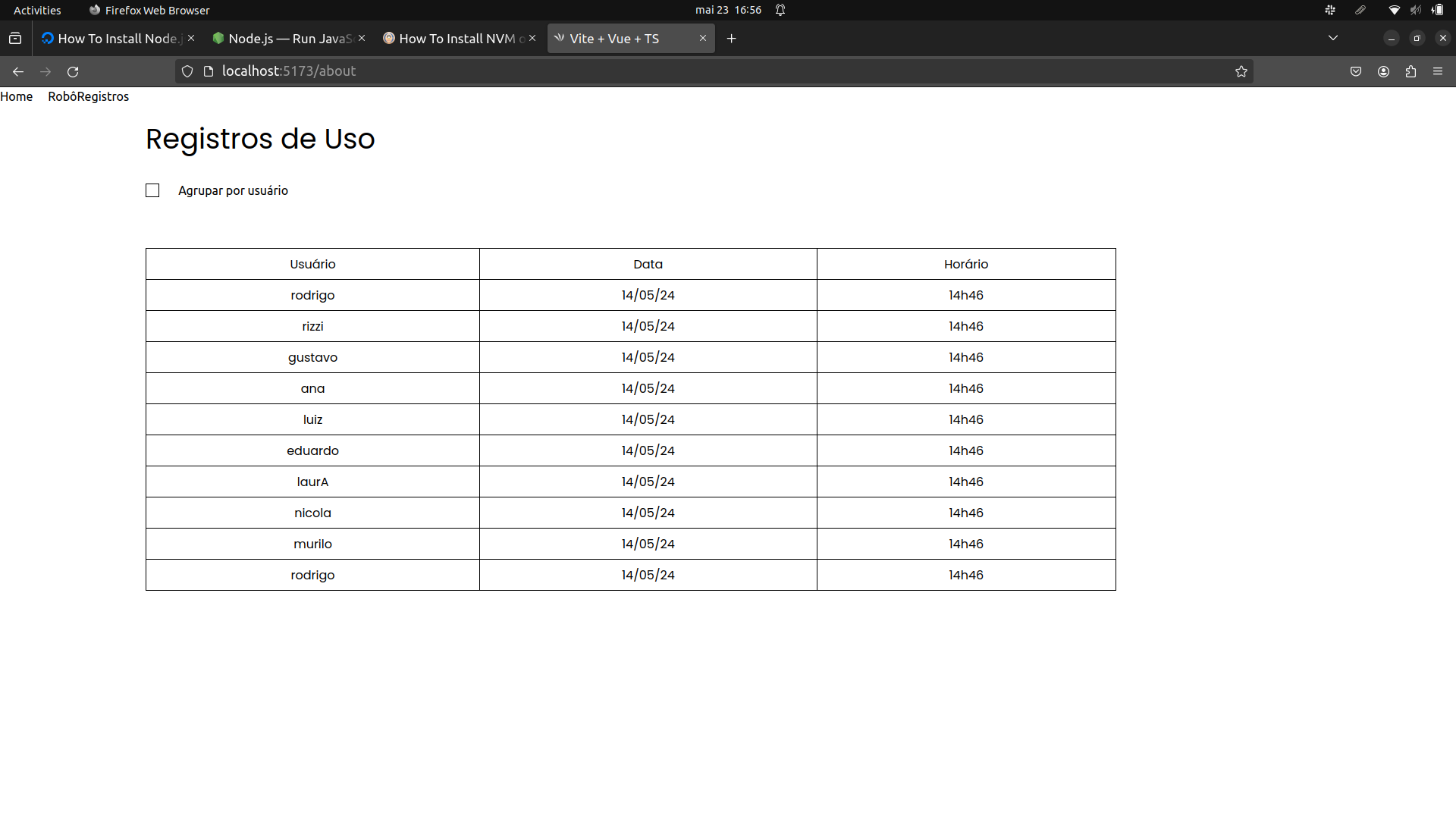
Histórico de dados
A página de histórico de dados tem o objetivo de servir como uma maneira de traçar quem utilizou o robô e o horário que isso foi feito. O objetivo é servir com um registro de quem utilizou e ter uma rastreabilidade desse uso.
 Fonte: Elaborado pelo grupo Cannabot
Fonte: Elaborado pelo grupo Cannabot
Considerações e próximos passos
Durante esta sprint o foco do grupo foi desenvolver a integração da movimentação do robô e transmissão de imagem. Assim, outras partes do código não puderam ser feitas.
Na próxima sprint o objetivo é implementar o sensor de temperatura e realizar as integrações de histórico de usos. Os dados que o usuário está vendo no momento não são dinãmicos.